§ 42. ОБЩИЕ СВЕДЕНИЯ О
ПРОМЫШЛЕННЫХ РОБОТАХ И МАНИПУЛЯТОРАХ
Стремление освободить человека от непосредственного участия в производственных
процессах привело к созданию манипуляторов и
роботов. Роботы появились в научно-фантастичной литературе, но развитие
науки и техники привело к их практическому созданию и внедрению. Сначала были
созданы так называемые роботы-манипуляторы, предназначенные в основном
для высвобождения человека от простых, однообразно повторяющихся движений,
которые легко поддаются автоматизации. Затем началось внедрение роботов для
работы во вредной для здоровья людей среде, а также для замены человека при
выполнении тяжелого физического труда.
Манипулятор
— это управляемое устройство или машина, снабженная рабочим органом для
выполнения двигательных функций, аналогичных функциям человеческой руки при
выполнении различных видов операций.
Манипулятором управляет непосредственно рука человека-оператора дистанционно или
с помощью программы, которую нельзя изменять. Прототипы таких устройств были
созданы еще в древности, но их производство для промышленных целей началось
совсем недавно.
Промышленный робот
представляет собой стационарный или передвижной программируемый манипулятор
промышленного назначения, способный выполнять комплекс изменяющихся движений,
предусмотренных в его программе.
Промышленный робот отличается от манипулятора универсальностью воспроизводимых
движений и возможностью перенастройки. Внедрение роботов в промышленности
началась в конце 60-х годов нашего столетия. Сначала они были предназначены для
выполнения несложных операций, таких, как точечная, дуговая сварка, окраска,
сортировка изделий и др. Однако с развитием и усовершенствованием их конструкций
и систем управления на них стали возлагать все более сложные монтажные,
контрольно-измерительные и другие операции.
Типы роботов многообразны, поэтому их классифицируют по различным признакам.
► Развитие робототехники идет в трех направлениях:
создание программируемых роботов, адаптивных (с самоприспосабливающимися
системами) и с искусственным интеллектом.
В программируемых роботах замена программы производится
человеком-оператором, после чего робот однообразно повторяет твердо заданную
программу.
В адаптивных роботах программа задается также человеком, но робот в ходе
технологического процесса в зависимости от обстановки может в определенных
пределах самостоятельно изменять программу (адаптироваться). Такие роботы
снабжены сенсорными устройствами, которые выполняют роль органов
осязания. С их помощью они распознают детали, инструменты, их расположение в
пространстве и др. Ими управляют с помощью электронно-вычислительных машин, их
память создана на базе интегральных микросхем.
Бурное развитие микропроцессорной и вычислительной техники позволило создать
роботы третьего поколения с элементами искусственного интеллекта. В них
программу в общем виде вводит человек, а робот обладает способностью
«обдумывать», принимать решения и выполнять действия в неопределенной и
меняющейся обстановке. Кроме сенсорных устройств в них имеются и элементы
искусственного интеллекта. По внешним признакам они действуют аналогично
человеку, обдумывающему и принимающему целесообразные решения (как поступить и
какие движения совершить) в неизвестной заранее и постоянно меняющейся
обстановке.
 |
|
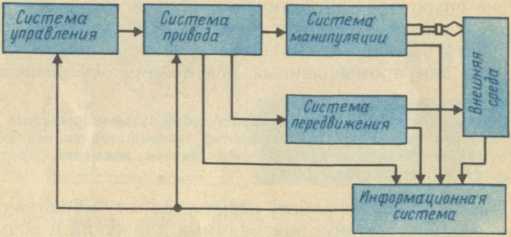
Рис. 184. Структурная схема промышленного
робота
|
Роботы изготовляют на основе нескольких систем, связанных между собой
(рис. 184).
Система манипуляции
(СМ) представляет собой механическое устройство (механическую руку-манипулятор)
с несколькими степенями свободы.
На конце системы имеется захват, вид которого зависит от выполняемых
технологических операций (перенос деталей, окраска и др.).
Система передвижения
(СП) предназначена для передвижения робота в рабочей зоне.
Устройство передвижения может быть колесным, шагающим, гусеничным или другого
типа.
Система привода
(СПр) служит для привода отдельных звеньев
СМ
и СП
в соответствии с управляющими сигналами системы управления.
Информационная система
(ИС) —система сенсорных и других устройств восприятия, измерения и обработки
данных о положении рабочих органов в рабочем пространстве, о передвижении робота
и о состоянии окружающей среды.
Информация передается системам управления и привода.
Система управления
(СУ) формирует управляющие воздействия для системы привода в соответствии с
заложенной программой и с данными, получаемыми от информационной системы.
Развитие робототехники определяется главным образом развитием систем
информации и управления: в каждом последующем поколении роботов они
становятся сложнее, но за счет этого расширяются их возможности выполнять все
более сложные задачи.
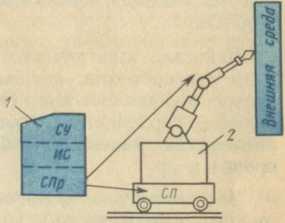
Системы манипуляции и привода образуют исполнительную часть робота
(ИЧ), являясь объектом управления. Совокупность остальных систем
составляет управляющее устройство робота (УУ). На рис. 185 показана общая
функциональная схема промышленного робота.
В промышленных роботах используют в основном три вида приводов:
пневматический, гидравлический и электромеханический.
Пневматический привод состоит из пневмоцилиндров с
возвратно-поступательным движением поршневого стержня. Роботы, созданные на его
основе, просты по конструкции, но обладают небольшой мощностью.
Гидравлические приводы работают по тому же принципу, что и
пневматические, но в качестве рабочего тела в них использовано масло. Такие
приводы имеют хорошие механические параметры. Их применяют для роботов большей
мощности и для выполнения более сложных технологических операций, требующих
высокой точности; их обслуживание сложнее: необходимо следить за уплотнением
гидравлической системы.
 |
|
Рис. 185. Функциональная схема промышленного
робота:
1 — управляющее устройство; 2 —
исполнительная часть
|
Электромеханические приводы выполняют на основе двигателей постоянного
тока, шаговых синхронных двигателей. В их конструкциях не требуются
трубопроводы. Их основной недостаток — необходимость создания дополнительной
передачи для регулирования оборотов двигателя.
В последующие годы применение промышленных роботов будет расширяться. Постепенно
они смогут взять на себя значительную часть функций человека на производстве.

