§ 38. ЭЛЕКТРОПРИВОД
Привод — система, для преобразования одного вида
энергии в механическую энергию рабочего механизма.
В настоящее время в качестве двигателя для привода производственных механизмов
используют в основном электродвигатели из-за их надежности, высокого кпд и
простоты управления.
► Привод, осуществленный с помощью электродвигателя,
называют электрическим (электроприводом).
В зависимости от числа механизмов, приводимых одним двигателем, или от числа
двигателей в одном механизме приводы бывают групповыми, однодвигательными и
многодвигательными.
Условия выбора электродвигателей. Независимо от условий работы и вида
рабочих механизмов электродвигатели для привода выбирают согласно общим
правилам.
Эти правила таковы. Должно соблюдаться:
полное соответствие между механическими свойствами
двигателя и требованиями производственного механизма;
мощность двигателя в процессе работы должна
использоваться максимально;
параметры двигателя (напряжение, частота) должны
соответствовать параметрам сети;
конструктивное исполнение двигателя должно
соответствовать условиям окружающей среды (влажность, пожароопасность,
взрывоопасность и др.);
двигатель должен быть удобен и безопасен для
обслуживающего персонала.
Правильный выбор электродвигателя обеспечивает стабильную и экономичную работу
механизма.
► Если не выдвигаются специальные требования к
регулированию частоты вращения, значению пускового момента или пускового тока,
то при выборе двигателя необходимо отдавать предпочтение асинхронным двигателям
с короткозамкнутым ротором. Они просты по устройству, легко управляемы и надежны
в эксплуатации.
Выбор мощности электродвигателей. Мощность электродвигателей определяется
нагрузкой производственных механизмов и режимом их работы. В зависимости от
характера и продолжительности рабочего цикла установлены три основные режима
работы: продолжительный, кратковременный и повторно-кратковременный.
 |
|
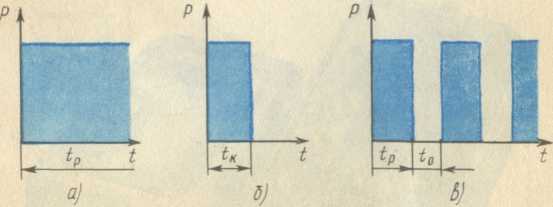
Рис. 167. Продолжительный (а),
кратковременный (б) и повторнократковременный (в)
режимы работы электродвигателей
|
Если во время рабочего цикла мощность остается постоянной, то режим называют
режимом постоянной нагрузки, а если она изменяется —
режимом переменной нагрузки. На рис. 167 представлены графики нагрузки
для трех режимов работы при постоянной нагрузке.
Повторно-кратковременный режим работы характеризуется
относительной продолжительностью включения, %:
где
tр — время работы;
t0 — время паузы.
Стандартные значения ПВ равны 15, 25, 40 и 60 % и указываются на
электродвигателях, предназначенных для повторно-кратковременного режима работы.
При кратковременном режиме работы на двигателях указывают
продолжительность кратковременной работы tк. Приняты
следующие стандартные продолжительности: 10, 30, 60 и 90 мин.
Мощность нагруженных двигателей Рнд
для всех трех режимов работы определяют по формуле
где
Рмех — мощность на валу механизма;
 —
кпд редуктора (устройства, передающего движение от двигателя к механизму).
—
кпд редуктора (устройства, передающего движение от двигателя к механизму).
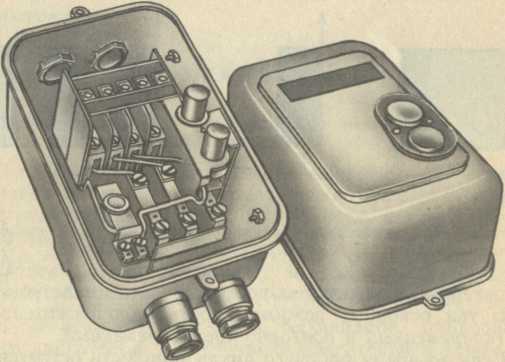 |
|
Рис. 168. Устройство воздушного пускателя
|
► При выборе двигателей для кратковременного и
повторно-кратковременного режимов должны соблюдаться также условия:
для кратковременного режима
tкд≥tк.мех;
для повторно-кратковременного режима ПВд≥
ПВмех.
Мощность производственного механизма Рмех
определяют по графику нагрузки либо вычисляют.
Например, мощность Рн центробежного насоса определяют по
формуле, кВт:
где
Q — производительность насоса, м3/с; Н — напор,
развиваемый насосом, м;
 —
объемная масса жидкости, Н/м3; kз
— коэффициент запаса (обычно в пределах 1,1 —1,3);
н
— объемный кпд насоса.
—
объемная масса жидкости, Н/м3; kз
— коэффициент запаса (обычно в пределах 1,1 —1,3);
н
— объемный кпд насоса.
Управление электроприводом. Управление электроприводом состоит в пуске,
останове, изменении направления вращения и регулировании частоты вращения
электрических двигателей. Важным условием обеспечения правильной и непрерывной
работы электроприводов является
выбор схемы управления. Используют несколько способов управления.
 |
|
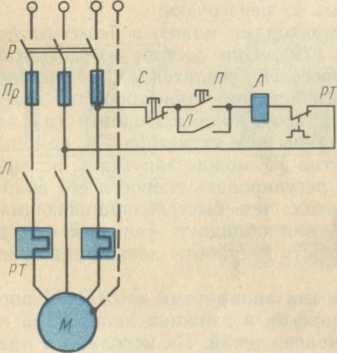
Рис. 169. Принципиальная схема управления
асинхронным двигателем
|
 |
|
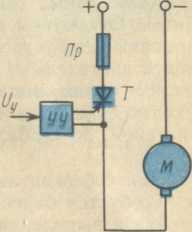
Рис. 170. Схема бесконтактного управления
двигателем постоянного тока
|
► Ручное управление осуществляется с непосредственным
участием человека, путем использования неавтоматических коммутационных аппаратов
(прерывателей, контроллеров и др.).
► Автоматическое управление осуществляется с
использованием аппаратов автоматического действия (реле, контакторов и др.).
Автоматическое управление облегчает труд людей, повышает производительность
труда, позволяет управлять механизмами дистанционно.
Среди аппаратов дистанционного управления электроприводами чаще всего используют
электромагнитные контакторы и пускатели (рис. 168).
Пускатели
представляют собой сочетание электромагнитного контактора с биметаллическим
термическим реле, смонтированными в общей коробке и укомплектованными кнопками
управления «Пуск» и «Стоп».
На рис. 169 представлена принципиальная схема управления асинхронным двигателем
М с магнитным пускателем. В схеме предусмотрены защита плавкими
предохранителями Пр и отключение от питающей сети разъединителем Р.
Управляют двигателем с помощью контактора Л и кнопок П («Пуск») и
С («Стоп»). Термореле РТ защищает двигатель от перегрузки.
Управлять электроприводами можно и бесконтактными аппаратами
(рис. 170). Они состоят из магнитных (трансформаторов, дросселей,
усилителей), полупроводниковых (диодов, транзисторов, тиристоров и др.) и
вспомогательных (резисторов, конденсаторов и др.) элементов. Открытием и
закрытием тиристора Т
с помощью управляющего устройства УУ можно запускать, останавливать
двигатель М и регулировать скорости его вращения. В таких аппаратах нет
быстроизнашивающихся механических деталей, они обладают большим быстродействием,
но стабильность их работы зависит от температуры.
Цепи с бесконтактными аппаратами сложнее и дороже. Требуется более дорогая и
сложная аппаратура настройки и выявления повреждений. Их используют
преимущественно в регулируемых приводах при большой частоте включений и в
приводах, работающих во взрывоопасной среде.

