§ 13. АСИНХРОННЫЕ МАШИНЫ
Асинхронные машины, как правило, используют в качестве двигателей.
Наибольшее применение получили трехфазные асинхронные двигатели. Их
используют для привода станков, насосов, вентиляторов, грузоподъемных механизмов
и во многих других случаях.
Асинхронные двигатели бывают от десятков ватт до нескольких мегаватт, при
напряжениях обмотки статора до 6 кВ.
► Асинхронные двигатели — самые распространенные на
производстве и в быту.
Принципиальным недостатком асинхронных двигателей являются трудности, связанные
с регулированием частоты вращения. Кроме того, эти двигатели имеют относительно
низкий соs (0,85—0,9 при полной нагрузке; 0,2—0,3 на холостом ходу). Рассмотрим трехфазный
асинхронный двигатель.
(0,85—0,9 при полной нагрузке; 0,2—0,3 на холостом ходу). Рассмотрим трехфазный
асинхронный двигатель.
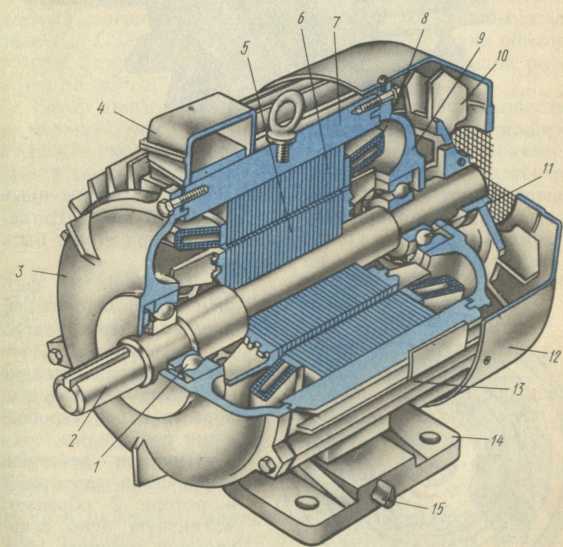
Устройство. Двигатель (рис. 56) состоит из неподвижной (статора) и
вращающейся (ротора) частей.
Основными деталями статора являются корпус 7 и сердечник 6
с обмоткой 8. Корпус отливают из алюминия (для маломощных двигателей) или
из чугуна. Ребра 13 на наружной части корпуса увеличивают площадь
поверхности охлаждения. Сердечник статора собран из листов электротехнической
стали, покрытых лаком.
Ротор состоит из шихтованного сердечника 5 с обмоткой и вала
2. Вал ротора вращается в подшипниках качения 1 и 11,
расположенных в подшипниковых щитах 3 и 9.
Двигатель охлаждают обдувом наружной поверхности корпуса. Поток воздуха
создается центробежным вентилятором 10, прикрытым кожухом 12.
Концы обмоток статора присоединены к зажимам коробки выводов 4\ для крепления
двигателя используют лапы 14, для заземления — болт 15.
На внутренней стороне полого цилиндра сердечника статора имеются пазы, в которые
закладывают статорную обмотку. У трехфазного двигателя она трехфазная и число
катушек ее в этом случае кратно трем (3, 6, 9 и т. д.)
► В зависимости от конструкции обмотки ротора
различают силовые асинхронные двигатели с короткозамкнутым и фазным роторами.
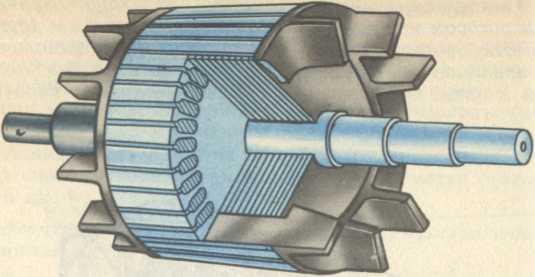
Трехфазный асинхронный двигатель с короткозамкнутым ротором
наиболее прост, надежен в работе и дешев. Обмотку ротора такого двигателя обычно
выполняют из алюминиевых стержней, которые заливают без изоляции в пазы.
Одновременно с торцов отливают короткозамыкающие кольца с лопастями вентилятора
для принудительного охлаждения. На рис. 57 изображен короткозамкнутый ротор (с
разрезом). В мощных машинах (Рн>100 кВт) для роторной
обмотки используют медные стержни и замыкающие кольца.
 |
|
Рис. 56. Устройство трехфазного асинхронного
двигателя:
1, 11
подшипники качения; 2 — вал; 3,
9—подшипниковые шиты; 4 — коробка выводов; 5
— сердечник ротора; 6 — сердечник статора; 7 —
корпус статора, 8 — обмотка статора; 10—вентилятор;
12 — кожух; 13 — ребра; 14 — лапы; 15
— болт заземления
|
В пазах ротора двигателя с фазным ротором укладывают обмотку, подобную
обмотке статора. Фазные обмотки ротора соединяют в звезду, а три ее вывода
подсоединяют к трем контактным кольцам, насаженным на вал и изолированным друг
от друга и от вала. Щетками, наложенными на кольца, обмотка ротора может быть
замкнута накоротко или на сопротивление.
 |
|
Рис. 57. Короткозамкнутый ротор
|
 |
|
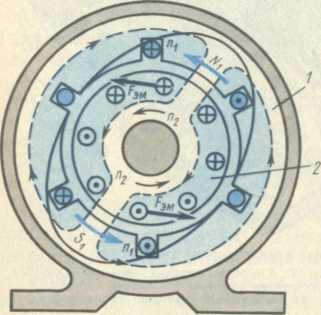
Рис. 58. К принципу действия асинхронного
двигателя
|
Двигатели с фазным ротором сложнее, дороже и менее надежны в эксплуатации, чем с
короткозамкнутым, но обладают лучшими пусковыми и регулировочными свойствами.
Принцип действия. Сердечники статора 1 и ротора 2
образуют магнитную цепь асинхронной машины (рис. 58). При прохождении
трехфазного тока по трехфазной обмотке статора создается вращающееся магнитное
поле N1 — S1
частоты
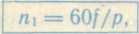 или
или

где
f — частота питающей сети; р
— число пар полюсов на фазу.
► При f
= 50 Гц для двигателей с числом полюсов
обмотки статора 2р = 2, 4, 6, 8, 10 синхронная частота вращения соответственно
равна 3000, 1500, 1000, 750, 600 об/мин.
Это поле (показано пунктиром) пересекает проводники обмотки ротора и наводит в
них эдс Е2. Под действием эдс в замкнутой обмотке
ротора возникает ток I2. На каждый проводник обмотки
ротора, пересекаемый магнитным полем, действует электромагнитная сила Fэм.
Силы, действующие на все проводники обмотки ротора, создают вращающий момент,
увлекающий ротор вслед за полем.
Ротор двигателя вращается с асинхронной скоростью n2
меньшей, чем синхронная скорость вращения поля n1.
Разность скоростей вращения поля и ротора характеризуется скольжением
S, часто выражаемым в процентах:
► В номинальном режиме работы двигателя
S
обычно невелико (2—6%). Если ротор неподвижен (n2=0),
то S=100%.
Наличие разности скоростей n1
и n2 принципиально необходимо (в двигателе), так
как только при этом создается электромагнитный вращающий момент. Если скольжение
отсутствует, то магнитное поле не пересекает проводники ротора, в них не
наводится эдс, не возникают токи, не создается электромагнитный вращающий
момент.
► Для изменения направления вращения ротора, т. е.
для реверсирования двигателя, необходимо изменить направление вращения
магнитного поля, создаваемого обмоткой статора.
Это достигают переключением двух фаз, т. е. двух из трех проводов, соединяющих
обмотку статора с сетью.
Механическая характеристика. Механическая характеристика
— это зависимость, показывающая, как меняется частота вращения ротора при
изменении момента на валу двигателя.
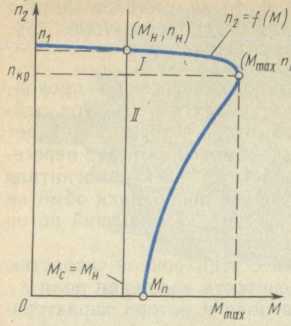
На рис. 59 представлена механическая характеристика n2=f(М)
асинхронного двигателя. Ее характерные точки: 0, n1
— идеальный холостой ход; Мmах,
nкр — максимальный момент, критическая частота
вращения; Мп, 0 — пусковой момент. Точкой Мmах
кривая делится на две области: I — область устойчивой работы, где
находится точка номинального режима (Мн, nн);
II — область неустойчивого режима, используемая при пуске или вынужденной
остановке двигателя.
 |
|
Рис. 59. Механическая характеристика
асинхронного двигателя
|
Двигатель в общем случае преодолевает некоторый момент сопротивления
Мс со стороны механизма. Зависимость момента
Мс от частоты вра щения двигателя для разных механизмов
различна. Рассмотрим наиболее простой случай, когда момент
Мс не зависит от частоты. При включении двигателя его
пусковой момент больше момента сопротивления (рис. 60, а) и ротор
приобретает ускорение. Скорость возрастает до тех пор, пока не установится
равенство моментов двигателя и сопротивления; при Мс=Мн
ротор вращается с номинальной частотой nн.
 |
|
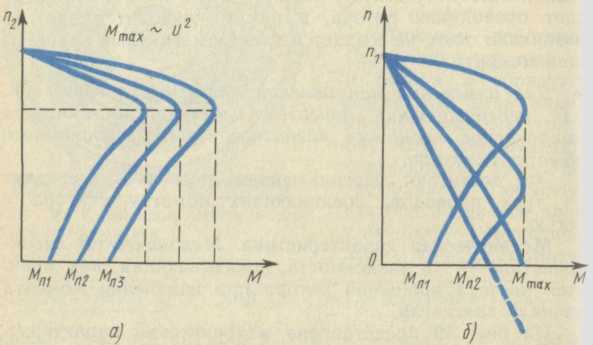
Рис. 60. Влияние на механическую характеристику
асинхронного двигателя: а — напряжения сети; б —
сопротивления в цепи ротора
|
При увеличении момента Мс новое устойчивое состояние
наступает при новом меньшем значении п2; при уменьшении Мс
— при большем значении
n2. На холостом ходу частота вращения ротора близка
к синхронной; если Мс
станет больше, чем Мmах. то двигатель
остановится.
► Вращающий момент двигателя пропорционален квадрату
напряжения питающей сети.
Если напряжение в сети снизилось, например, на 10%, то значения Мmах
и Мн понизятся на 19%. Значение nкр
при понижении напряжения остается постоянным (рис. 60, а).
► Помимо естественной для двигателя с фазным ротором
могут быть получены искусственные механические характеристики.
Для этого в цепь обмотки ротора включают добавочное сопротивление
Rдоб. Чем больше
Rдоб, тем круче спадает кривая n=f(М)
(рис. 60, б), тем «мягче» становится механическая характеристика. При
изменении Rдоб
значение Мmах
сохраняется постоянным.
Можно подобрать такое Rдоб, чтобы пусковой момент
приобрел максимальное значение.
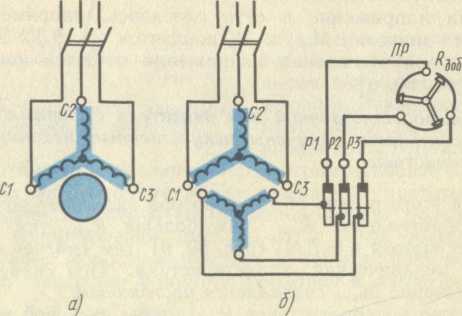
Пуск двигателя с короткозамкнутым ротором. Для двигателей с
короткозамкнутым ротором обычно применяют прямое включение в сеть обмотки
статора С1, С2,
С3 (рис. 61, а) с помощью соответствующей
коммутационной аппаратуры. Кратковременный толчок пускового тока (Iп=4÷7·Iн)
безопасен для двигателя, но может явиться причиной чрезмерно большого падения
напряжения в сети при недостаточной мощности источника энергии (обычно
трансформатора). В этих случаях ограничивают пусковой ток пуском двигателя при
пониженном напряжении.
► Напряжение в период пуска двигателя понижают:
используя в период пуска соединение обмотки статора в звезду с последующим
переключением ее на треугольник; включая в цепь обмотки статора на период пуска
добавочные активные или реактивные сопротивления (реакторы); подключая двигатель
к сети через понижающий автотрансформатор.
Общий недостаток всех способов — значительное уменьшение пускового и
максимального моментов двигателя, пропорциональных квадрату приложенного
напряжения.
Пуск двигателя с фазным ротором. Хорошими пусковыми характеристиками
обладает двигатель с фазным ротором. Для снижения пускового тока обмотки Р1,
Р2, РЗ ротора при пуске замыкают на активное сопротивление Rдоб
пускового реостата ПР (рис. 61, б). При этом уменьшается ток
ротора, а следовательно, и ток статора В то же время активная составляющая тока
ротора воз растает, увеличивая пусковой момент. В пусковом реостате обычно
имеется несколько ступеней, которые последовательно выводятся во время пуска
вплоть до замыкания обмотки ротора накоротко. Длительная работа с добавочным
сопротивлением в цепи ротора неэкономична.
 |
|
Рис. 61. Принципиальные схемы включения
трехфазных асинхронных двигателей с короткозамкнутым (а)
и с фазным (б) ротором
|
Регулирование частоты вращения. Частота вращения ротора асинхронного
двигателя определяется скоростью вращения магнитного поля:
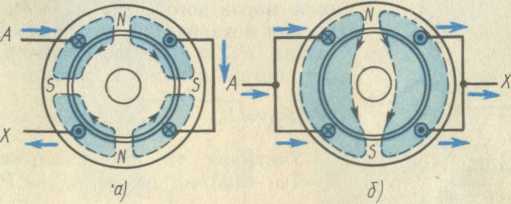
► Для ступенчатого изменения частоты вращения
применяют специальные двух-, трех- и четырехскоростные двигатели. На их статоре
размещают обмотки с различным числом полюсов.
Кроме того, можно использовать переключение фазных обмоток статора
с последовательного соединения (рис. 62, а) на параллельное (рис. 62, б).
При этом число полюсов уменьшается и соответственно увеличивается n1.
► Для плавного регулирования частоты вращения
применяют тиристорные преобразователи частоты, питающие двигатели электрическим
током с регулируемой частотой.
 |
|
Рис. 62. Изменение числа полюсов магнитного
поля при включении катушек фазы статорной обмотки
последовательно (а) и параллельно (б)
|
В двигателях с фазным ротором для регулирования скорости переключают ступени
реостата, включенного в цепь ротора. Двигатели работают в этих режимах
сравнительно кратковременно. В целом такое регулирование неэкономично.
Торможение. При эксплуатации двигателей нередко возникает необходимость
их торможения (быстрый переход от одного режима к другому, точная
остановка и пр.).
► Торможение двигателя может быть механическим и
электрическим.
При механическом торможении электромагнит или пружины воздействуют через
тормозные колодки на шкив, закрепленный на валу двигателя.
При электрическом торможении используют либо режим противовключения,
когда у работающего двигателя переключением двух фаз меняется направление
вращения поля, либо режим динамического торможения, когда после
отключения двигателя от сети в обмотку статора кратковременно подается
постоянный ток.
 |
|
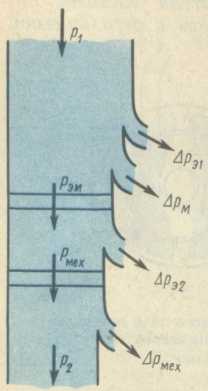
Рис. 63. Энергетическая диаграмма асинхронного
двигателя
|
Энергетическая диаграмма. Распределение мощности, потребляемой
двигателем, иллюстрируется энергетической диаграммой (рис. 63). Пусть трехфазный
асинхронный двигатель получает от сети мощность
Р1= UI·cos.
Часть этой мощности до преобразования в электромагнитную мощность Pэм
вращающегося поля теряется в обмотке статора (потери
UI·cos.
Часть этой мощности до преобразования в электромагнитную мощность Pэм
вращающегося поля теряется в обмотке статора (потери
 Рэ1),
на гистерезис и вихревые токи (магнитные потери
Рм).
Мощность вращающегося магнитного поля Pэм=М
Рэ1),
на гистерезис и вихревые токи (магнитные потери
Рм).
Мощность вращающегося магнитного поля Pэм=М 1
и полная механическая мощность двигателя Pмех=М2
различаются за счет потерь в обмотке ротора:
1
и полная механическая мощность двигателя Pмех=М2
различаются за счет потерь в обмотке ротора:

Учитывая то, что скольжение S=(1—2)/1,
имеем
Рэ2=
РэмS.
► Чем больше скольжение, тем больше потери в роторе.
Поэтому двигатели рассчитывают так, чтобы при нормальной работе скольжение было
невелико. Обычно S=
0,02÷0,06.
Полезная мощность P2
на валу меньше, чем Pмех, за счет
механических потерь
Pмех
в двигателе (трение в подшипниках, потери на вентиляцию и пр.).
Характер зависимости кпд двигателя от загрузки примерно такой же, как и у
трансформаторов. Его максимальные значения 0,64—0,95. Большие значения кпд
соответствуют более мощным двигателям.
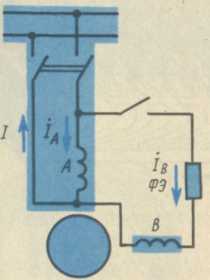
В однофазных асинхронных двигателях мощностью до 1—2 кВт имеется две
обмотки (рис. 64): рабочая А и пусковая В, сдвинутые на половину
полюсного деления (90 эл. град). Обе обмотки питаются от сети однофазного тока.
Для создания вращающегося магнитного поля через пусковую обмотку должен
проходить ток IB
со сдвигом по фазе на 90° по отношению к току IА
рабочей обмотки. Это достигается включением в цепь пусковой обмотки
фазосдвигающего элемента ФЭ: активного сопротивления или емкости.
После запуска двигателя пусковая обмотка отключается. Движение поддерживается
пульсирующим полем рабочей обмотки.
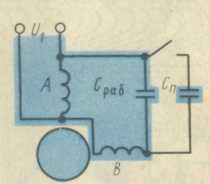
В конденсаторном двигателе (рис. 65) во время работы включены обе обмотки
А и В. Необходимый сдвиг по фазе между токами создается включением
последовательно одной из них рабочей емкости Сра6,
причем при пуске желательно иметь несколько большую емкость, что достигается
включением Сп. После разгона и снижения тока пусковую
емкость отключают, что позволяет улучшить условия работы двигателя в номинальном
режиме. Мощности конденсаторных двигателей невелики (до 1,5 кВт).
 |
|
Рис. 64. Принципиальная схема однофазного
асинхронного двигателя с пусковой обмоткой
|
 |
|
Рис. 65. Принципиальная схема конденсаторного
двигателя
|
Асинхронные двигатели небольшой мощности (до 600 Вт) применяют в
автоматических устройствах и электробытовых приборах. Обычно используют
однофазные микродвигатели. Для этих двигателей характерны повышенное (по
сравнению с обычными двигателями) сопротивление обмотки ротора и соответственно
работа с повышенным скольжением.
В устройствах автоматики используют асинхронные исполнительные двигатели
и асинхронные тахогенераторы.
Исполнительные двигатели служат для преобразования электрического сигнала
в механическое перемещение вала. Частота вращения таких двигателей должна плавно
изменяться под воздействием сигнала управления. Исполнительные двигатели не
допускают самохода (при снятии сигнала управления ротор останавливается), имеют
линейные механические и регулировочные характеристики, высокое быстродействие,
бесшумны.
 |
|
Рис. 66. Электромагнитная схема линейного
асинхронного двигателя
|
Асинхронные тахогенераторы преобразуют механическое вращение в
электрический сигнал. Их применяют для измерения частоты вращения, выработки
ускоряющих и замедляющих сигналов, выполнения операций дифференцирования и
интегрирования в схемах счетнорешающих устройств.
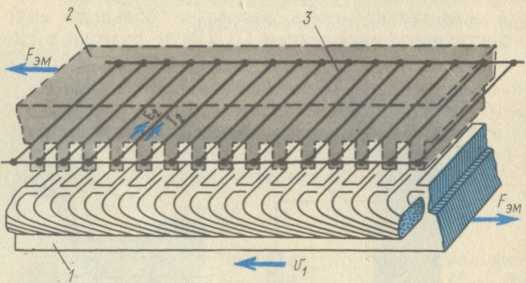
Линейные асинхронные двигатели применяют в тех случаях, когда требуется
линейное перемещение подвижной части исполнительного устройства. Их принцип
действия (рис. 66) основан на способности многофазной системы токов создавать
«бегущее» магнитное поле. Такое поле создается токами трехфазной обмотки,
уложенной в прямолинейный статор 1. Параллельно статору располагают
подвижную часть двигателя — магнитопровод 2, в пазы которого заложены
алюминиевые или медные стержни 3
короткозамкнутой обмотки.
Взаимодействие бегущего магнитного поля с токами I2,
наводимыми в этой обмотке, создает электромагнитные силы Fэм,
увлекающие подвижную часть двигателя за собой.
Подвижной частью такого двигателя может быть электропроводящая жидкость
(жидкие металлы, электролиты), которая заполняет канал между двумя статорами е
трехфазной обмоткой. Такие устройства называются магнитогидродинамическими
насосами.
► Использование линейных двигателей позволяет
исключить в механических устройствах кинематические звенья для преобразования
вращательного движения в поступательное.

